摩擦
古典力学 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
F=ddt(mv){displaystyle {boldsymbol {F}}={frac {mathrm {d} }{mathrm {d} t}}(m{boldsymbol {v}})} 運動の第2法則 | ||||||||||
歴史 | ||||||||||
| ||||||||||

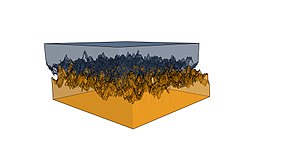
フラクタル的な粗い表面を持つ面どうしが重なり、静止摩擦がはたらいている様子のシミュレーション[1]。
摩擦(まさつ、英: friction)とは、固体表面が互いに接しているとき、それらの間に相対運動を妨げる力(摩擦力)がはたらく現象をいう。物体が相対的に静止している場合の静止摩擦と、運動を行っている場合の動摩擦に分けられる。多くの状況では、摩擦力の強さは接触面の面積や運動速度によらず、荷重のみで決まる。この経験則はアモントン=クーロンの法則と呼ばれ、初等的な物理教育の一部となっている[2]。
摩擦力は様々な場所で有用なはたらきをしている。ボルトや釘が抜けないのも、結び目や織物がほどけないのも摩擦の作用である[3]。マッチに点火する際には、マッチ棒の頭とマッチ箱の側面との間の摩擦熱が利用される。自動車や列車の車輪が駆動力を得るのも、地面との間にはたらく摩擦力(トラクション)の作用である[4]:6,55。
摩擦力は基本的な相互作用ではなく、多くの要因が関わっている。巨視的な物体間の摩擦は、物体表面の微細な突出部(アスペリティ)がもう一方の表面と接することによって起きる。接触部では、界面凝着、表面粗さ、表面の変形、表面状態(汚れ、吸着分子層、酸化層)が複合的に作用する。これらの相互作用が複雑であるため、第一原理から摩擦を計算することは非現実的であり、実証研究的な研究手法が取られる。
動摩擦には相対運動の種類によって滑り摩擦と転がり摩擦の区別があり、一般に前者の方が後者より大きな摩擦力を生む。また、摩擦面が流体(潤滑剤)を介して接している場合を潤滑摩擦といい[5][6][7]、流体がない場合を乾燥摩擦という。一般に潤滑によって摩擦や摩耗は低減される。そのほか、流体内で運動する物体が受けるせん断抵抗(粘性)を流体摩擦もしくは摩擦抵抗ということがあり、また固体が変形を受けるとき内部の構成要素間にはたらく抵抗を内部摩擦というが、固体界面以外で起きる現象は摩擦の概念の拡張であり[8][9]:3、本項の主題からは離れる。
摩擦力は非保存力である。すなわち、摩擦力に抗して行う仕事は運動経路に依存する。そのような場合には、必ず運動エネルギーの一部が熱エネルギーに変換され、力学的エネルギーとしては失われる。たとえば木切れをこすり合わせて火を起こすような場合にこの性質が顕著な役割を果たす。流体摩擦(粘性)を受ける液体の攪拌など、摩擦が介在する運動では一般に熱が発生する。摩擦熱以外にも、多くのタイプの摩擦では摩耗という重要な現象がともなう。摩耗は機械の性能劣化や損傷の原因となる。摩擦や摩耗はトライボロジーという科学の分野の一領域である。
目次
1 歴史
2 摩擦の基礎
2.1 クーロンの摩擦モデル
2.1.1 静止摩擦
2.1.2 動摩擦
2.1.3 垂直抗力
2.1.4 摩擦角
2.1.5 クーロンモデルの限界
2.1.6 クーロンモデルの数値的シミュレーション
2.2 摩擦係数
2.2.1 摩擦係数の概略値
2.2.2 自己潤滑性
2.2.3 負の摩擦係数
2.3 摩擦が発生するメカニズム
2.3.1 摩擦の凹凸説
2.3.2 凝着摩擦
2.3.3 掘り起こし摩擦
2.4 乾燥摩擦と不安定性
3 その他の条件における摩擦
3.1 潤滑摩擦
3.2 転がり摩擦
3.3 真空中での摩擦
3.4 原子レベルでの摩擦
4 広義の摩擦
4.1 内部摩擦
4.1.1 流体の内部摩擦
4.2 流体摩擦
4.3 放射摩擦
5 摩擦のエネルギー
5.1 摩擦による仕事
6 応用
6.1 ベルト摩擦
6.2 陸上車両
6.3 測定
6.4 日常における利用
6.5 摩擦の低減
6.5.1 機械要素
6.5.2 潤滑剤
7 関連項目
8 脚注
9 外部リンク
歴史
「摩擦 (friction)」という語を初めて文献中で用いたのはアイザック・ニュートンだとされる[10]:2。しかし、アリストテレスを始めとする古代ギリシャ人や、ウィトルウィウス、大プリニウスらは早くから摩擦の原因や緩和法に興味を持っていた[11]。このころすでに静止摩擦と動摩擦の違いは知られていた。テミスティオスは350年に「動いている物体の運動をさらに強める方が、静止している物体を動かすより易しい」と記している[11][12][13][14]。
1493年、トライボロジーのパイオニアであったレオナルド・ダ・ヴィンチにより、滑り摩擦に関する古典的な法則が発見された。それらは私的な記録に残されたのみだったが[15][16][17][18][19]、ギョーム・アモントンによって1699年に再発見され、後に摩擦の基本法則(アモントン=クーロンの法則)の一部とみなされるようになった。アモントンは摩擦が生じる理由として、物体表面の微小な凹凸がかみ合うことで相対運動を妨げるという凹凸説(roughness theory)を示した[10]。この見方はのちにベルナール・フォレスト・ド・ベリドール[20]とレオンハルト・オイラーによって深化された(1750年)。オイラーは斜面上に置かれたおもりの摩擦角を導き、静止摩擦と動摩擦を初めて明確に区別した[21]。ジョン・デサグリエ(1734年)は摩擦における凝着の役割を初めて認識し、接触面の凝着が引きはがされるときに発生するのが摩擦抵抗だという凝着説(adhesion theory)を唱えた[22]。
摩擦の理解をさらに進めたのはシャルル・ド・クーロンである(1785年)。クーロンは摩擦の四つの主要因として、物体とその表面塗装の性質、接触面積、接触面に垂直な圧力(荷重)、待機時間[23]に注目した[15]。クーロンはさらに、滑り速度や温度と湿度の影響を考慮に入れて、凹凸説と凝着説のどちらが正しいかを突き止めようとした。クーロンは摩擦の法則の中で静止摩擦と動摩擦を区別した(下記参照)が、この点は1758年に既にヨハン・アンドレアス・フォン・ゼーグナーによって論じられていた[15]。ピーテル・ファン・ミュッセンブルーク(1762年)は待機時間の効果を説明するため、繊維状になった接触面を想定し、繊維が次第に噛み合っていくことで時間とともに摩擦が進行するという見方を示した。
ジョン・レスリー(1766 - 1832年)はアモントンとクーロンの見方の弱点を指摘した。アモントンが言うように接触面で凹凸が噛み合っているならば、物体を滑らせたとき、接触点が凹凸の傾斜を上る間は抵抗が発生するが、傾斜を下るときに埋め合わされるのではないか? レスリーはデサグリエの凝着説に対しても同程度に懐疑的であり、凝着も抵抗としてだけではなく加速力としてはたらくのではないかと述べた[15]。レスリーの観点では、摩擦とは時間とともにアスペリティが押し延ばされていく過程であって、それによって空洞だったところに新たな障害物が作りだされるのだという。
アーサー・モリン(1833年)は転がり摩擦と滑り摩擦という概念を展開した。オズボーン・レイノルズ(1866年)は粘性流れの式を導いた。これにより、工学において現在一般に用いられている経験的な摩擦の古典モデル(静止摩擦、動摩擦、流体摩擦)が完成した[16]。1877年にフリーミング・ジェンキンとジェームス・アルフレッド・ユーイングは静止摩擦と動摩擦の連続性について研究した[24]。
20世紀の摩擦研究は、その物理的なメカニズムの解明に焦点があてられた。フランク・フィリップ・バウデンとデイビッド・テーバーは、微視的なレベルでの真実接触面積が見かけの接触面積よりもはるかに小さいことを明らかにした[17]。バウデンとテーバーの著書 The friction and lubrication of solids(1950年。邦題『固体の摩擦と潤滑』)は摩擦研究の古典とみなされている[25]:17[26]。彼らによると、アスペリティの先端がもう一方の接触面に触れた部分だけが真実接触部となり、圧力が増えると接触部の面積は増加する。こうした現代的な形の修正凝着理論が摩擦の基礎理論として広く認められるようになった[10]:3,38。また原子間力顕微鏡(~1986年)の開発は原子スケールでの摩擦研究を可能にした[16]。その結果、原子スケールでの摩擦は接触面間のせん断応力と接触面積の積で与えられることが明らかになった。これらの二つの発見によって、アモントンの第一法則、すなわち、巨視的な乾燥摩擦面では垂直抗力と静止摩擦力が比例することが説明された。
1966年、摩擦と潤滑に関する科学技術の振興を目的とした包括的な答申書(ジョスト報告、Jost Report)がイギリスで作成された。この報告が注目を集めたのは、摩擦研究の発展によって、社会全体でGNPの1.3%にのぼる経費が節約できるという試算を示したためである。また同時に摩擦の関連分野の研究を「トライボロジー」という造語で呼ぶことが提案された。日本の通商産業省はこれに追随して1970年と1971年に「わが国潤滑問題の現状」という報告書を作成した。ドイツ、アメリカもこれに続き、共通基盤技術としてのトライボロジーの重要性が広く認識されるようになった。[27]:164-169
摩擦の基礎
摩擦とは、互いに接する二つの物体が接触面に沿って相対的な運動を行うことを妨げる力である。静止した物体の間にはたらく静止摩擦(静摩擦)と、互いに対して運動している動摩擦(運動摩擦)の二つの領域がある。摩擦力は常に接触面の相対的な滑り運動を妨げる方向にはたらく。すなわち、静止摩擦の場合には動き出そうとする方向の逆向き、動摩擦の場合には相対速度の逆向きである。たとえば、斜面上の物体が滑り落ちずにその場に止まることができるのは静止摩擦力のはたらきである。また氷の上を滑るカーリングの石はそれを減速させるような動摩擦力を受ける。
この節では摩擦面の間に流体が挟まれておらず(乾燥摩擦)、物体が転がらない場合(滑り摩擦)について論じる。
クーロンの摩擦モデル
摩擦の基本的な性質は15~18世紀に実験的に明らかにされた。現在では以下の三つの経験則(アモントン=クーロンの法則)が知られている。
アモントンの第一法則: 摩擦力は加えた荷重に直接比例する。
アモントンの第二法則: 摩擦力は見かけの接触面積にはよらない。
クーロンの摩擦法律: 動摩擦は滑り速度によらない。
これに「静止摩擦は動摩擦より大きい」という第四の法則を付け加える場合もある[4][10][28]。アモントン=クーロンの法則に基づく近似的なモデルをクーロンの摩擦モデルという。このモデルは適用範囲が広いことから摩擦の計算に一般に用いられている。
静止摩擦

斜面に置かれたブロックが受ける力ベクトルの図解。F{displaystyle F} が摩擦力、N{displaystyle N} は垂直抗力、W{displaystyle W} は重力である。静止摩擦ではこれらの三力がつり合っている。



静止摩擦の支配的なモデル式は以下である[29]:139。
- F≤μN{displaystyle Fleq mu N}

それぞれの記号の意味は以下の通りである。
F{displaystyle F} はそれぞれの接触面が互いに及ぼし合う摩擦力の大きさである。この力は面に対して並行で、外から加えられた力と逆向きにはたらく。
μ{displaystyle mu } は静止摩擦係数と呼ばれる比例定数である。後述の動摩擦係数と合わせて摩擦係数と呼ぶ[30]:1266。クーロンモデルでは、静止摩擦係数は接触する二つの物質によって決まる経験的なパラメータである。多くの場合、静止摩擦係数は動摩擦係数よりも大きい。
N{displaystyle N} はそれぞれの接触面が互いに及ぼし合う、面に対して垂直な力(垂直抗力)である(後の項参照)。

クーロンモデルにおいて、静止摩擦力 F{displaystyle F} はゼロから最大値 μN{displaystyle mu N} までのいかなる大きさでも取りうる。その方向は、摩擦がなければその物体が動いたであろう方向の逆向きになる。つまり、物体を動かすような外力が加わったとき、静止摩擦力は外力をちょうど打ち消して摩擦面に相対的な運動が起きないようにする。外力を大きくしていくと、それを打ち消すために摩擦力も上昇していく。

物体に運動を行わせるには、外力があるしきい値を超えなければならない。クーロンの式から分かるのは摩擦力の大きさではなくそのしきい値 μN{displaystyle mu N}(静止摩擦係数と垂直抗力の積)である。摩擦力の大きさはしきい値を越えられないため、外力がそれを超えると力のつり合いが破れて運動が始まり、その時点から動摩擦がはたらきはじめる[4]。しきい値は最大静止摩擦力と呼ばれる。動き出す直前に最大静止摩擦力が生じている状態
- F=μN{displaystyle F=mu N}

を極限つり合いの状態と呼ぶ[4]。
動摩擦

物体につけたひもを引く力 T を増やしていく。物体が静止している間は、静止摩擦力 f と T がつり合っており合力はゼロとなる。外力が増えるとともに摩擦力も増えていき、最大静止摩擦力 f0 に達するとつり合いが崩れて物体は動き出す。いったん動き始めると動摩擦力 f がはたらくようになるが、その大きさは f0 よりも小さい。
動摩擦とは、地面の上をすべるそりのように、二つの固体が互いにこすりながら相対運動を行う時に生じる摩擦である。動摩擦力 F{displaystyle F} は動摩擦係数 μ′{displaystyle mu ^{prime }} と垂直抗力 N{displaystyle N} の積で与えられる[29]:140。

- F=μ′N{displaystyle F=mu ^{prime }N}

クーロンモデルでは、動摩擦力は見かけの接触面積や滑り速度などの影響を受けず、運動中は一定の大きさを保つ。動摩擦力は必ず速度の逆向きにはたらくため、運動物体は徐々に減速を受けて最後には止まってしまう。
動摩擦係数は静止摩擦係数よりも小さいのが普通である[31][32]。しかし、リチャード・ファインマンは「乾燥した金属どうしの摩擦ではほとんど違いを見出せない」と述べている[33]。動摩擦力が静止摩擦力よりも高くなりうることを示す理論モデルも登場し始めている[34]。
動摩擦力の向きは接触面の相対運動に対して逆向きにはたらく。たとえば、電車の車輪の回転速度が速すぎてレールに対して空転しているような場合、レールから見ると車輪の接触面は後方向きの相対運動を行っているので、車輪が受ける動摩擦力の向きは前方となる。つまり、電車は駆動力を得て前方に加速する。逆に、走行中に車輪の回転速度が極端に遅くなったなら、レールから見て車輪は前方に滑っていくことになるため、動摩擦力の向きは後方となり電車は制動力を得る。つまりブレーキがかかる。[35]
垂直抗力
垂直抗力 N{displaystyle N} とは、接触面どうしを互いに押し付ける力の合力と定義される。単純に水平面上に物体を置いた場合には、垂直抗力の要素は重力だけであり、N=mg{displaystyle N=mg} と表される。このとき摩擦力の大きさは物体の質量 m{displaystyle m}、重力加速度の大きさ g{displaystyle g}、摩擦係数の積となる。摩擦係数は質量や体積に無関係である。例えば、大きなアルミニウムの塊も小さなアルミニウムのかけらも摩擦係数は変わらない。その一方、摩擦力は垂直抗力を通じてブロックの質量に依存する。



物体を水平面ではなく傾斜面に置くと、面に垂直な重力成分が小さくなるため垂直抗力も小さくなる。このような場合、垂直抗力や摩擦力は自由体図にベクトルを描くことで求められる。物体に対して鉛直方向の外力が加わる場合など、状況によっては重力以外の力も垂直抗力に寄与することもある。
摩擦角

摩擦角 θ とはブロックがちょうど滑り始める角度をいう。滑り出す直前、斜面に沿った方向にかかっている重力の分力 mg sinθ は最大静止摩擦力 f = μN と等しくなっている。
斜面上に静止させた物体が滑り落ちずに済む最大の傾斜角として静止摩擦を定義することも可能である。この角度を摩擦角といい、以下のように定義する。
- tanθ=μ{displaystyle tan {theta }=mu }

ここで θ は水平面から測った傾斜角、μ は斜面と物体との間の静止摩擦係数である[36]。この式によって、摩擦角の測定を通じて μ の値を求めることができる。
クーロンモデルの限界

二つの物体の真実接触部(矢印)は見かけの接触面のごく一部に過ぎない。
摩擦面において実際に接触を担っているのは、様々な長さスケールにわたる固体表面の隆起(アスペリティ)だと考えられている。アスペリティ構造はナノスケールの小ささに至るまで存在する。固体と固体が接触するとき、実際に触れあっているのは有限個のアスペリティの突端のみであり、それら真実接触部の面積は見かけの接触面積のわずかな部分(10−3% - 1%)を占めるに過ぎない[27]:179[9]。接触面への荷重が増加すると、アスペリティはもう一方の表面に押し付けられ、塑性流動によって接触面積が広がる。これにより、荷重と真実接触面積の間に線形の関係が生まれる。接触部で作られる分子間接合(凝着)を壊して面を滑らせるためには、真実接触面積に材料のせん断強さ(単位面積当たりの結合を切るのに必要なせん断応力)をかけた分だけの力が必要である。このように、クーロン摩擦において最大静止摩擦力と荷重(垂直抗力)が比例する理由は凝着に基づいて説明できる(凝着摩擦の節参照)[9][37]。
ただし、この経験則は結局のところ、極度に複雑な物理的相互作用の詳細を無視した近似則でしかない。たとえば、真実接触面積が見かけの接触面積に近づくと変化が飽和して比例関係が壊れるため、荷重が大きい領域ではクーロン近似は成り立たない。あるいは、表面酸化膜が弱い銅のような金属では、荷重によって表面層が壊れるため摩擦係数は一定とみなせない[25]:71。また、接触面に結合が生じると、クーロン摩擦は非常に悪い近似となる。たとえば粘着テープが滑りを妨げる効果は垂直抗力がゼロや負であっても生じる。ゲルにはたらく摩擦力は接触面積に強く依存することがある[9]:10。この理由によりドラッグレース用のタイヤには粘着性を持つものがある。
クーロン近似が当てはまらない状況もあるとはいえ、その強みは単純さと適用範囲の広さにあり、多くの物理系の摩擦について十分に有効な描像である[9]。
クーロンモデルの数値的シミュレーション
クーロンモデルは単純化されたものであるが、多体系や粉粒体での数値的シミュレーションへの適用は多くの場合有用である。そのもっとも単純な表式であっても本質的な凝着と滑りの効果が取り入れられており、多くの場面に適用することができる。ただし、クーロン摩擦と単側接触・両側接触を持つ力学系を数値積分するためには専用のアルゴリズムを設計しなければならない[38][39][40][41][42]。いわゆるパンルヴェのパラドックスのような非線形性の強い効果のいくつかはクーロン摩擦から起きる[43]。
摩擦係数
| 摩擦係数 coefficient of friction | |
|---|---|
| 量記号 | μ |
| 次元 | 無次元量 |
| 種類 | スカラー |
摩擦係数とは垂直抗力に対する摩擦力の比で定義される無次元量で、多くの場合ギリシャ文字 μ で表される。摩擦係数は物質の組み合わせによってゼロに近い値から1を超える値にまでなる。摩擦係数の項を初めて導入し、その使い方を示したのはアーサー・モリンである[15]。
静止摩擦係数と動摩擦係数はどちらも接触している物質の組み合わせに依存する。たとえば、鋼の上に置かれた氷は摩擦係数が小さく、舗装道路の上に置かれたゴムは摩擦係数が大きい。金属同士の接触では、異種金属よりも性質の似た金属の組み合わせの方が大きい摩擦係数を持つという原則がある。つまり、真鍮を鋼やアルミニウムとこすり合わせるより、真鍮どうしをこすり合わせる方が摩擦係数は大きくなる[44]。互いに静止している接触面についての静止摩擦係数は、ほとんどの場合、同じ接触面が互いに滑っている場合の動摩擦係数よりも大きい。しかし、テフロンどうしの組み合わせのように静止摩擦係数と動摩擦係数に差がない場合もある[45]。
乾いた物質の組み合わせでは、摩擦係数はほとんどの場合0.3から0.6までの値になる。この範囲を超える値は希少だが、たとえばテフロンは0.04という低い値を持ちうる。摩擦係数が0となるのは摩擦が全くはたらかない場合であって現実には考えにくい。摩擦係数が1より大きくなることはないという主張がしばしば見られるが、正しくない。1を超える摩擦係数は、単に物体を滑らせるのに必要な力が接触面にはたらく垂直抗力より大きいということを意味するに過ぎない。現実的には μ<1{displaystyle mu <1} となる場合がほとんどだが、たとえばゴムとほかの物質との間の摩擦係数は1から2の値を取りうる。シリコーンゴムやアクリルゴムをコーティングした面の摩擦係数は1よりはるかに大きくなる。

摩擦係数は単純な物性値というより、系全体の特性と考える方が実際に近い。真の物性値(伝導率、誘電率、降伏強さなど)が物質の種類だけで決まるのに対し、摩擦係数は温度や湿度、滑り速度、雰囲気、待機時間など、系に特有の変数に依存する[8][9]:12-14。また物質界面の形状的な特性、すなわち表面粗さの影響も受ける[1]。たとえば、雪や氷のような融点が低い物質の滑り摩擦では摩擦熱が大きな役割を果たす。氷上を高速で滑ると接触部で融解が起き、水が潤滑剤となって摩擦係数は0.1以下になるが、低速で界面の圧力も低い場合には摩擦係数は 0.6 - 0.8 にまで高くなりうる。ロケットスレッドや銃砲身などでは、金属界面でさえ融解が起きる[46]。したがって摩擦特性について一般則を見出すのは困難である。摩擦によって表面構造がダイナミックに変化する場合、従来は表面科学的な解析を行うことも困難であった[47]。しかし、近年では摩擦現象のその場観察の手法が進歩しつつある[48]。
静止摩擦係数は物体の変形特性と表面粗さによって決まるが、その起源をたどれば、それぞれの物体の内部や表面の原子、あるいは吸着分子の間にはたらく化学結合である。静止摩擦の大きさを決める上で、物体表面のフラクタル性、すなわちアスペリティのスケーリング挙動を記述するパラメータが重要な役割を持つことも知られている[1]。
摩擦係数の概略値
| 物質の組み合わせ | 静止摩擦係数 μ{displaystyle mu } | 動摩擦係数 μ′{displaystyle mu ^{prime }} | |||
|---|---|---|---|---|---|
| 乾燥清浄表面 | 潤滑表面 | 乾燥清浄表面 | 潤滑表面 | ||
| アルミニウム | 鋼鉄 | 0.61 | 0.47[45] | ||
| アルミニウム | アルミニウム | 1.5[49] | |||
| 金 | 金 | 2.5[49] | |||
| プラチナ | プラチナ | 3.0[49] | |||
| 銀 | 銀 | 1.5[49] | |||
| アルミナセラミック | 窒化ケイ素セラミック | 0.004(濡れた面)[50] | |||
ホウ化マグネシウムアルミニウム(AlMgB14) | 二ホウ化チタン(TiB2) | 0.04-0.05[51] | 0.02[52][53] | ||
| 真鍮 | 鋼鉄 | 0.35-0.51[45] | 0.19[45] | 0.44[45] | |
| 鋳鉄 | 銅 | 1.05 | 0.29[45] | ||
| 鋳鉄 | 亜鉛 | 0.85[45] | 0.21[45] | ||
| コンクリート | ゴム | 1.0 | 0.30(濡れた面) | 0.6-0.85[45] | 0.45-0.75(濡れた面)[45] |
| コンクリート | 木 | 0.62[54] | |||
| 銅 | ガラス | 0.68 | |||
| 銅 | 鋼鉄 | 0.53 | 0.36[45] | ||
| ガラス | ガラス | 0.9-1.0[45] | 0.4[45] | ||
| ヒトの関節液 | 軟骨 | 0.01[55] | 0.003[55] | ||
| 氷 | 氷 | 0.02-0.09[56] | |||
ポリエチレン | 鋼鉄 | 0.2[45][56] | 0.2[45][56] | ||
PTFE(テフロン) | PTFE | 0.04[45][56] | 0.04[45][56] | 0.04[45] | |
| 鋼鉄 | 氷 | 0.03[56] | |||
| 鋼鉄 | PTFE | 0.04[45]-0.2[56] | 0.04[45] | 0.04[45] | |
| 鋼鉄 | 鋼鉄 | 0.74[45]-0.80[56] | 0.16[56] | 0.42-0.62[45] | |
| 木 | 金属 | 0.2-0.6[45][54] | 0.2(濡れた面)[45][54] | ||
| 木 | 木 | 0.25-0.5[45][54] | 0.2(濡れた面)[45][54] | ||
自己潤滑性
固体物質の中で特に摩擦係数が小さい物質を自己潤滑性材料もしくは固体潤滑剤という[26]。グラファイトやポリテトラフルオロエチレンはその代表で、特に後者は摩擦係数が低いことが知られている[26]。ポリアセタールなどの結晶性プラスチックは金属との間の摩擦係数が極めて低く、機械摺動部によく用いられる[57]。鉛などの軟質金属も自己潤滑材料に含まれる場合がある[26]。これらの固体潤滑剤を用いた軸受は、流体潤滑剤では支持できないような高荷重・低速の条件や、潤滑剤の使用に向かない高温・真空・水中などの環境での用途に発展してきた[58]。
固体潤滑剤以外にも、焼結金属などの多孔質体に潤滑油を浸みこませたものや、熱可塑性樹脂に潤滑油を練り込んだものも自己潤滑性材料と呼ばれる。これらは給油の必要のないメンテナンスフリーな軸受の材料となる[58]。
負の摩擦係数
2012年現在、低負荷領域において実効的な摩擦係数が負となりうる可能性が示されている。これはつまり、垂直抗力を増やすと摩擦が増加するという日常的な経験に反して、垂直抗力を減らすと摩擦が増加するという現象を指す[59]。この研究は酸素が吸着したグラフェンシートの上をAFMの探針を滑らせた時に発生する摩擦に関するもので、2012年10月の『ネイチャー』で報告された[59]。
摩擦が発生するメカニズム
アモントンの素朴な凹凸説は否定されて久しいが、道路とゴムの間の摩擦のように表面粗さの効果が優位となる状況は多い[34]。慣性力よりも表面力が支配的となるマイクロスケール・ナノスケールでも表面粗さと接触面積が物体の動摩擦に影響する[60]。
現在一般に理解されているところでは、動摩擦の原因は大きく分けて3つある。(1) 摩擦面のあちこちにある真実接触部が化学結合を作り(凝着)、滑り面の運動とともに破断と再凝着を繰り返す(凝着摩擦)。(2) 表面の凹凸が互いにぶつかり合って弾性変形を起こし、そのときに内部摩擦によって力学的エネルギーの一部が熱に変わる(弾性変形抵抗)。(3) アスペリティがもう一方の面に突き刺さり、面を掘り起こしながら進んで行くため仕事が必要となる(掘り起こし摩擦)。その他の塑性変形を4つ目に数えることもある[8][28]。これらの3つの原因による抵抗力をそれぞれ F1{displaystyle F_{1}}、F2{displaystyle F_{2}}、F3{displaystyle F_{3}} とすれば、摩擦力はその和で与えられる。



- F=F1+F2+F3{displaystyle F=F_{1}+F_{2}+F_{3}}

高分子の摩擦では弾性変形の効果 F2{displaystyle F_{2}} が主要な寄与を生むことが知られている。弾性ヒステリシスの小さい金属どうしの場合、乾燥摩擦では凝着破断の効果 F1{displaystyle F_{1}} が大きいが、よく潤滑されていれば掘り起こしの効果 F3{displaystyle F_{3}} の割合が上昇する。[4][28]
摩擦の凹凸説

微小な凹凸を持つ摩擦面のモデル。外力F{displaystyle F} と荷重 W{displaystyle W} 、接触面での垂直抗力 N{displaystyle N} がつり合っている。
クーロンモデルが成立する機構として、凝着説とともに古くから検討されてきた候補の一つが凹凸説である。クーロンによる議論は以下のようなものである。固体表面の微小な凹凸を、のこぎり歯のような三角形の連なりとしてモデル化する。どの三角形も高さや傾斜角 θ{displaystyle theta } は等しいとする。上下の面の三角形が図のように噛み合った状態で横方向の力を加えて滑り運動を起こさせようとすると、接触点の一つでは、横方向の力 F{displaystyle F} 、鉛直方向の荷重 W{displaystyle W} 、斜面からの垂直抗力 N{displaystyle N} がつり合う。つり合いの条件は

- F=Nsinθ,W=Ncosθ{displaystyle F=Nsin theta ,W=Ncos theta }

であるから、
- F=Wtanθ{displaystyle F=Wtan theta }

のように、荷重に比例する横方向の力が発生することになる。この場合、摩擦係数は W{displaystyle W} に対する F{displaystyle F} の比として
- μ=FW=tanθ{displaystyle mu ={frac {F}{W}}=tan theta }

と決まり、見かけの接触面積にはよらないため、アモントン=クーロンの法則と矛盾しない。しかし、凹凸説で動摩擦を説明するには、凸部の頂点を越えて斜面を下るときに正の加速が行われることが難点となる。接触部の変形による損失を考えなければ、斜面を登るときと下るときに受ける仕事の和がゼロとなるので、正味の摩擦力が発生しないことになる。そのほか、凹凸説では表面が平坦に近いほど(θ→0{displaystyle theta rightarrow 0})摩擦力は小さくなるが、実際の物体では逆の振る舞いを示す場合も多い。これらのことからクーロンの凹凸説は摩擦の主要因としてはすでに否定されたと言える。[3]:14-19[9]:4-7[25]:48-51

凝着摩擦
一つの接触点における凝着摩擦について、真実接触面積を A{displaystyle A}、材料のせん断強さ(凝着を壊すために必要なせん断応力の大きさ)を s{displaystyle s} とすると、摩擦力は F1=As{displaystyle F_{1}=As} で与えられる。またアスペリティ先端が摩擦面に圧迫されて塑性変形を起こしているとすれば、材料の塑性流動圧力(塑性変形を与えるために必要な圧力の大きさ)を pm{displaystyle p_{m}} として荷重が W=Apm{displaystyle W=Ap_{m}} となる。この時摩擦係数は





- μ=FW=AsApm=spm{displaystyle mu ={frac {F}{W}}={frac {As}{Ap_{m}}}={frac {s}{p_{m}}}}

となる。s{displaystyle s} と pm{displaystyle p_{m}} はいずれも材料の特性であって滑り速度や荷重にはよらないので、摩擦係数がアモントン=クーロンの法則にしたがうことが示される。また塑性論によれば s{displaystyle s} と pm{displaystyle p_{m}} はどんな物質でもおおよそ一定の関係にあり、μ≃0.2{displaystyle mu simeq 0.2} という妥当な大きさの摩擦係数が導かれる。ただしこの単純な理論は大まかな見積もりであって、現実の金属ではしばしば摩擦係数が1以上になることを説明できない。[25]

バウデンとテーバーは、垂直荷重だけではなく滑り方向の力が加わることで凝着部が成長するという理論(修正凝着説)を展開し、清浄表面で摩擦係数が高くなりうることを説明した[4][28]。それによると、滑り方向の力 F{displaystyle F} が加わらないときの接触面積を A0{displaystyle A_{0}} とすると、真実接触面積 A{displaystyle A} は

- AA0=1+α(FW)2{displaystyle {frac {A}{A_{0}}}={sqrt {1+alpha left({frac {F}{W}}right)^{2}}}}

で表される。α{displaystyle alpha } は横方向の力によって凝着部が成長することを表すパラメータで、たとえばミーゼスの降伏条件(弾性エネルギーが限界値に達したときに塑性流動が始まるとするモデル[61])では α=3{displaystyle alpha =3} となる[28]。さらに、表面の清浄度を表すパラメータ k{displaystyle k}(0<k<1{displaystyle 0<k<1})を導入して




- s=ksm{displaystyle s=ks_{m}}

とおく。完全な清浄面のせん断強さを sm{displaystyle s_{m}} として、界面の汚れによって実際のせん断強さ s{displaystyle s} が減少することを表したものである。これらの前提から導かれる摩擦係数は

- μ=1α(k−2−1){displaystyle mu ={frac {1}{sqrt {alpha left(k^{-2}-1right)}}}}

というものである。完全な清浄面(k=1{displaystyle k=1})に近づくにつれて摩擦係数は発散する(焼き付きが生じる)。[25][28]

ナノスケールにおける凝着が動摩擦力を生むメカニズムは熱力学によっても説明できる[62]。アスペリティ先端の真実接触部がもう一方の面に対して運動すると、接触部が通り過ぎた後方では新たな表面が作られ、前方では既存の表面の上に接触部が被さっていく。あらゆる表面は熱力学的な表面エネルギーを持つので、表面を作るためには仕事を与えなければならないし、表面が消失するとその分のエネルギーが熱として放出される。したがって、接触部の後方では抵抗力が、前方では摩擦熱が発生する。
掘り起こし摩擦
硬いアスペリティが柔らかい面に突き刺さり、やすりをかけるかのように面に沿って動くような状況を考えると、掘り起こしによる摩擦力は
- F3=A′pm{displaystyle F_{3}=A^{prime }p_{m}}

で与えられる。A′{displaystyle A^{prime }} は突き刺さった部分の進行方向に対する投影面積、pm{displaystyle p_{m}} は柔らかい方の物質の塑性流動圧力である。A′{displaystyle A^{prime }} はアスペリティ形状と荷重によって決まるが、半頂角 θ{displaystyle theta } の円錐を考えるなら

- A′=2π⋅1tanθ⋅Wpm{displaystyle A^{prime }={frac {2}{pi }}cdot {frac {1}{tan theta }}cdot {frac {W}{p_{m}}}}

が成り立つため、摩擦係数は
- μ=F3W=2π⋅1tanθ{displaystyle mu ={frac {F_{3}}{W}}={frac {2}{pi }}cdot {frac {1}{tan theta }}}

のように物質によらない一定値となる。機械加工による標準的な粗さの面では θ≃85{displaystyle theta simeq 85}°程度であるから μ=0.05{displaystyle mu =0.05} という比較的小さな値となり、掘り起こし摩擦の寄与はそれほど大きくないことがわかる。[25]


乾燥摩擦と不安定性
本来安定な振る舞いを示す力学系でも、摩擦によって様々な種類の不安定性が引き起こされることがある[63]。たとえば滑り速度の増加とともに摩擦力が減少するような系や、摩擦熱の発生によって物体が膨張する場合や(熱弾性不安定性)、あるいは純粋に弾性体間の滑り運動のダイナミクスから不安定性が発生する場合(Adams-Martins不安定性)である。最後の現象は1995年にジョージ・G・アダムスとJoão Arménio Correia Martinsによってなめらかな表面について初めて発見され[64][65]、後に周期的な粗さを持つ表面についても発見された[66]。特に、ブレーキノイズやグラス・ハープなどスティックスリップ現象と関連する振動現象は、滑り速度とともに摩擦係数が低下するというモデルに基づいて[67]、摩擦を伴う系のダイナミクスにおける不安定性が原因だと理解されるようになった[68][69]。
実用上重要なケースにはバイオリン、チェロ、ハーディ・ガーディ、二胡のような擦弦楽器の弦の自励振動がある。
単純な力学系について、空力弾性力学におけるフラッター不安定性と乾燥摩擦とのつながりが発見された[70][71]。
摩擦による不安定性が原因で、摩擦面にトライボ膜のような自己組織パターン(二次構造)がその場で形成されることがある。これはいわゆる自己潤滑材料で摩擦や摩耗を低減するために利用される[72]。
その他の条件における摩擦
潤滑摩擦

潤滑状態と摩擦係数の間の関係を示すストライベック線図。横軸は潤滑流体の粘性・摺動速度・荷重によって決まる無次元数、縦軸は摩擦係数を表す。高粘度で摩擦面に対する荷重が低く、摺動速度が大きいほど摩擦状態は図の右へ移行する。[73]
潤滑摩擦とは固体摩擦面の間に流体が存在する場合をいう。潤滑とは摩擦面に潤滑剤と呼ばれる物質を塗ることで摩耗を低減する技術である。適度な潤滑を行うことで機構の動作はなめらかになり、摩耗が緩和され、ベアリングに過剰な応力や焼き付きが発生することがなくなる。潤滑が効かなくなると、金属などの機械部品の摺動面で異常な高温や損傷・断裂を生じることがある。
潤滑摩擦は流体層の厚さによってさらに流体潤滑、境界潤滑、混合潤滑に分けられる。荷重が小さい領域では、摩擦面の潤滑液が押し出される動きに対して粘性摩擦がはたらくため、流体層はある程度の厚さを保っている(流体潤滑、図の3)。荷重が大きくなると、流体層が薄くなって滑り面の凹凸が互いに接触し始め、摩擦係数が急激に増大する(混合潤滑、図の2)。さらに荷重が増すと、流体層は分子レベルの薄さに達する(境界潤滑、図の1)。[9]:15[73]
転がり摩擦
転がり摩擦(転がり抵抗とも)とは、車輪などの円形物体が表面上を転がる時に生じる抵抗力をいう。一般的に転がり摩擦は滑り摩擦よりも小さい[74]。転がり摩擦において、動摩擦係数は転がり速度によって増加することが知られている[28]。
転がり摩擦の起源は滑り摩擦と同じく弾性変形や凝着、掘り起こしなどだが、車輪と面の間に滑りがない自由転がりの場合には、弾性変形によるヒステリシス損失が支配的となる。ゴムのタイヤとアスファルト舗装では、動摩擦係数は路面の状態にもよるが0.015程度となる[28]。弾性ヒステリシス損失の少ない金属どうしの場合には転がり摩擦係数は非常に小さく、鉄道の車輪とレールの間では10−2から10−4にもなる[27][75]。
道路を走る自動車のタイヤは転がり摩擦の好例である。タイヤが熱を持ったり走行音を発するのも摩擦のプロセスによるものである[76]。
真空中での摩擦
金属を高真空中に置くと、表面に吸着していた気体分子が脱離したり酸化膜が消失することで凝着が起こりやすくなる。同種金属の摩擦係数は空気中で0.6程度だが、真空中では1をはるかに超えることがある。清浄な銅どうしでは100近い摩擦係数すら実現できる。 グラファイトは潤滑剤としても用いられる物質で、摩擦係数は常圧で0.1程度だが、酸素や水の分子を脱離させると0.7以上に増加する。プラスチックはもともと表面エネルギーが低く、ファンデルワールス力による弱い吸着(物理吸着)しか起こらないため、吸着による摩擦特性の変化は小さい。[25]:97-108
このような結果から、大気圧条件下では潤滑剤を用いない場合にも厳密には乾燥摩擦とは言えないことがわかる。
原子レベルでの摩擦

超潤滑のモデル。凹凸は原子間力のポテンシャルを示す。清浄な微小原子面どうしが接触するとき、互いに向きが異なると凹凸の位置が整合しない。この場合、接触部が上り坂となっている場所もあれば、下り坂となっている場所もあるので、総体としてはどの方向にも力がはたらかない。このとき摩擦力は極度に小さくなる。
ナノマシンの設計では、接触している原子どうしをすれ違わせるのに必要な力を求めるのが課題となる。2008年、単一の原子を物体表面上で動かすのに必要な力が初めて測定された。超高真空中におかれた銅やプラチナの基板を低温(5 K)に冷却し、その上に置かれたコバルト原子や一酸化炭素分子を特製の原子間力顕微鏡によって動かす実験である[77]。
原子スケールで平滑な面どうしが接触している場合、それぞれの面の原子配列が摩擦に大きな影響を与える。原子周期が整合した原子面どうしの接触では、一般に結合力(すなわち摩擦力)は強くなる。逆に原子周期が不整合である場合、すべての原子を同時にエネルギー的に安定な位置に置くことができないため、結合力が実質的にはたらかなくなることがある。たとえば(高配向性熱分解)グラファイトどうしや、タングステンとシリコンの清浄表面の接触で0.01以下の摩擦係数が観察されている[78]。このように極度に摩擦が小さい状態は超潤滑と呼ばれる[9]:82-87。
広義の摩擦
固体接触面で起きるわけではないが、摩擦と名の付く現象をここに挙げる。
内部摩擦

弾性ヒステリシス曲線。変形量(横軸)に対する外力(縦軸)の変化を表す。青色の曲線にそって負荷を増やしていった時と、赤色の曲線にそって負荷を減らしていった時では必要な力が異なる。曲線で囲まれた部分の面積がエネルギー損失を与える。
物体が変形したとき、その内部でエネルギーの一部が熱に変わる現象を内部摩擦という。理想的な弾性体では応力と変形量は線形の関係にあるが、一般の物質では変形を増加させるときと減少させるときとで応力が異なる(弾性ヒステリシス)。動摩擦において、弾性平面上を接触点が滑っているとすると、その前方では接触点によって面が押し込まれて圧縮変形を受け、後方では凹んだ面が元に戻る時に接触点を前に押し出している。理想的な弾性体ではこれらの仕事はつり合うが、弾性ヒステリシスが存在すると、圧縮の際に面が受ける仕事の方が変形回復の際に放出する仕事よりも大きくなる。すなわち運動体のエネルギー損失を招く。[10]:194-195
内部摩擦の大きさを表す量はいくつかある。強制振動を与えた時に生じる変形量と応力の間の位相遅れ(誘電損失の損失角と同様)、共振曲線におけるQ値の逆数、振動サイクルあたりのエネルギー減衰率や対数減衰率である。[79]
流体の内部摩擦
流体層の間に相対的な速度差があると、それを減少させるようなせん断力がはたらく。これによって流体内部で流れに対する抵抗力が生じることを粘性という。日常的には粘性は「濃い」「ドロッとしている」のように表現される。水は「サラサラ」としていて比較的粘性が低いのに対し、蜂蜜は「ドロドロ」であって粘性が高い。流体の粘性が小さいほど変形させたり運動させたりするのが容易である。
現実の流体は(超流体を除く)、せん断力に対して何らかの抵抗を示す。すなわち粘性を持つ。流体力学の理論では説明のために「理想流体」という概念が使われる。理想流体は粘性を持たず、せん断力に対してなんら抵抗を示さない。
流体摩擦
流体摩擦もしくは摩擦抵抗とは、物体の周りを流れる流体と物体表面との相互作用から生じる抵抗力である。流体摩擦は抗力の式から導かれ、流速の自乗および物体の表面積に比例する。流体摩擦は物体周辺の境界層における粘性抗力から発生する。流体摩擦を低減するには、流体が周りをなめらかに運動できるような物体形状(エーロフォイル、翼型)を採用するか、物体の長さと断面積を可能な限り減らす方法がある。
放射摩擦
1909年にアルベルト・アインシュタインは光圧が物体の運動に対する抵抗力としてはたらくことを予言し、「放射摩擦 (radiation friction)」と呼んだ[80]。「一枚の板は常に両側から電磁放射による圧力を受けている。板が静止している限り、両側の圧力は等しい。しかし板が運動している場合には、進行方向側の面(前面)において背面より多くの放射が反射を起こすことになる。したがって、前面の圧力が与える力は、背面の圧力が与える力よりも大きい。よってこれらの合力は板の運動に対する抵抗としてはたらき、板の速度とともに増大する。この合力を簡潔に「放射摩擦」と呼ぶ」
摩擦のエネルギー
エネルギー保存則によればエネルギーが消失することはないが、注目している系から他へ移って見えなくなることはある。特に、力学系からエネルギーが失われて熱へと変化する現象は多い。摩擦はその典型である。たとえばホッケーパックが氷上を滑ると摩擦によって運動エネルギーが熱に変換され、パックと氷表面の熱エネルギーが上昇する。摩擦熱は急速に散逸するので、アリストテレスをはじめとする古代の自然哲学者はその存在に気づかず、単に運動物体は駆動力がなければエネルギーを自然に失うものと考えていた。
ある物体に力を加えながら経路 C{displaystyle C} に沿って運ぶとき、熱に変換されるエネルギー量 Eth{displaystyle E_{th}} は仕事の定義通りに線積分で求められる。


- Eth=∫CF(x)⋅dx =−∫Cμ′N(x)ds{displaystyle E_{th}=int _{C}mathbf {F} (mathbf {x} )cdot dmathbf {x} =-int _{C}mu ^{prime }N(mathbf {x} )ds}

ここでそれぞれの記号は以下の意味を持つ。
F{displaystyle mathbf {F} } :摩擦力
x{displaystyle mathbf {x} } :物体の位置
μ′{displaystyle mu ^{prime }} :動摩擦係数。表面材質の違いなどによって場所ごとに異なる可能性があるため積分の中に入れてある。
N{displaystyle N} :垂直抗力の大きさ
s{displaystyle s} :経路に沿った移動距離


摩擦の作用によって力学系からエネルギーが失われるのは熱力学的な不可逆性の一例である。
摩擦による仕事
静止摩擦は変位を伴わないため仕事を行わない。二つの摩擦面の間の界面を基準とする座標系において、動摩擦力は常に運動の逆向きにはたらいて負の仕事を与える[81]。しかし、座標系によっては摩擦が正の仕事を行うことがある。たとえば敷物の上に箱を置き、敷物を急に引っ張ってみれば明らかである。このとき敷物を基準とすれば箱は後方に進むが、床を静止点に取った座標系では箱は前方に進む。つまり箱と敷物の間の動摩擦力は箱に運動の向きに沿った加速度を与えて正の仕事を行う[82]。
摩擦力が行う仕事は物体の変形や摩耗、熱へと変わり、界面の性質に影響を与える(摩擦係数が変わることもある)。研磨はこのプロセスを利用している。摩擦攪拌接合のようなプロセスでは、摩擦の仕事が物質を軟化・混合させるために用いられる。機械の摺動面において、摩擦の仕事が受容できないようなレベルに達すると激しい侵食や摩耗が起きる。摺動面に微小な振動が作用したときに起きる摩耗や損傷をフレッティングという[83]。摺動面の間に硬度の高い侵食粒子が入ると摩耗や摩擦が強められる(アブレシブ摩耗)。摩擦の仕事によって過剰な摩耗が生じると軸受の焼き付きや破壊につながる可能性がある。機械部品の表面が摩耗すると、公差を超過する隙間が生じたり、表面粗さの程度が増したりして機械が作動しなくなることもある[84]。
動摩擦がはたらいている間、摩擦面ではアスペリティの突端ともう一方の面との間で凝着と破断が繰り返されている。破断の時に放出される熱エネルギーが微小な接触部に集中することで、閃光温度と呼ばれる瞬間的な高温が生まれる。その温度は500 - 800℃と言われ、10-4sほど持続した後、周辺に散逸する[10][25]:76。
応用
摩擦は多くの工学の分野で重要な要素として扱われる。
ベルト摩擦

摩擦がはたらくプーリーにかけたロープでおもりを吊っている様子。ロープ両端にはたらく張力をそれぞれ T1{displaystyle T_{1}} 、T2{displaystyle T_{2}} とする。


ベルト摩擦とは、プーリーにかけたベルトやボラードに巻き付けたロープにはたらく摩擦力をいう。プーリーにかけたベルトの一端を引っぱるとき、もう一端に伝わる張力はプーリーから受ける摩擦力によって弱まっている。この張力はオイラーの式
- T2=T1eμθ{displaystyle T_{2}=T_{1}e^{mu theta }}

を用いてモデル化される[25]:230-231。ここで μ{displaystyle mu } は摩擦係数、T1{displaystyle T_{1}} 、T2{displaystyle T_{2}} はそれぞれ保持側と負荷側の張力、θ{displaystyle theta } は巻き角である。T2{displaystyle T_{2}} は実地でそのベルトが保持できる最大の張力にあたる。キャプスタンのような索具装備の設計者は、ロープを何周巻き付ければ滑って抜けることがないかを知るためにこの理論を用いる。クライマーや帆船乗員の基本技術の中にもベルト摩擦の一般的な知識を要するものがある。
陸上車両
ほとんどの陸上車両では、車輪と地面との間にはたらく摩擦力を利用して、車両に運動を開始させたり、加減速や方向転換を行っている。走行中の自動車のタイヤは、接地面の前方では路面と粘着(固着)しているが、後方では滑りが生じているのが一般的である。粘着領域でタイヤは前後方向に変形しており、その復元力が自動車に加速・減速を生じさせる[85]。局所的な復元力が最大静止摩擦力に達すると粘着は壊れ、路面との間で相対的に滑りながら元の形に戻る[86]。接触面で発生する粘着摩擦とすべり摩擦の和をトラクションと呼び[28][87]、車両の重量に対するトラクションの比をトラクション係数という[4]:55[89]。トラクション係数が理論上最大となるのはタイヤ接地面全体で滑り摩擦が生じているときで、このときトラクション係数はタイヤと路面の間の動摩擦係数と一致する[85]。完全な滑り状態(空転・滑走)では車の制御が行えないので、トラクションが路面の摩擦を越えない範囲で運転するのが最適とされる[87]。
粘着式鉄道とは、自動車のタイヤと同様に車輪とレールとの間の摩擦力を利用して駆動力を生む方式を指す。列車の重量に対する駆動力の比は粘着係数と呼ばれる[35]。
自動車のエンジン出力を伝達するトランスミッションのうち、無段変速機(CVT)などは摩擦力を利用して力を伝える。
ブレーキとは、摩擦の原理を利用して乗り物の運動エネルギーを熱に変換することで減速を行う仕組みである。ディスクブレーキでは回転するブレーキディスクとそれを挟み付けるブレーキパッドとの間の摩擦を利用する。ドラムブレーキでは、ブレーキシューを回転する筒(ブレーキドラム)に押し付けて摩擦を生む。ブレーキディスクはドラムよりも冷却が容易な利点がある。ブレーキパッドの摩擦材は繰り返しの利用や摩擦熱による高温に耐える必要がある[25]:231-234。
道路のすべりやすさ(en:road slipperiness)は自動車の設計と安全性における重要な要因である[90]。
スプリット路とは、路面の摩擦係数が左右の車輪で異なる状態をいい、非常にスリップの危険が高い。
道路の表面構造はタイヤと路面との相互作用に影響を及ぼす。
測定
トライボメータは物体表面の摩擦を測定する器械である。静止摩擦の測定には摩擦角の原理を利用した傾斜法などがある。動摩擦の測定には、摺動面で発生する力を直接測定する方式のほか、振り子式のように振動の減衰を利用したり、駆動モータの負荷電力を通じて測定する方式がある。また摺動を与える方式には、試験片の形状や滑り形態によって回転ピンオンディスク式、往復動ボールオンディスク式、四球式など様々なものがある[10]:156-168。
プロファイログラフは道路の表面粗さを測定する装置である。
日常における利用
- 人間の掌が物体を掴むことができるのは指紋による強い静止摩擦のおかげである[25]:6。
粘着パッドは滑らかな表面に置かれた物体が滑り落ちることを防ぐため、摩擦係数を増やす目的で貼るものである。- 原始的な発火法では木材をこすり合わせる摩擦熱を利用して火口への点火を行う。火打石を火打金に打ち付ける発火法では、金属の摩耗粉に摩擦熱が与えられて高温となり、さらに酸化反応の熱が加わることで火花となる。マッチやフリント式ライターでも点火の仕組みは同様である。[27]
摩擦の低減
機械要素

転がり軸受の一種である玉軸受。外筒側と内筒側の間で転がり摩擦を起こし、回転の摩擦抵抗を減らす。
滑り摩擦が発生する部分に機械要素を使うと、より摩擦抵抗の小さい転がり摩擦や流体摩擦へと変えることができる。回転する軸を支えるようなときは、転がり軸受が活用される。接する物体どうしが直線相対運動を行う場合は転がり案内が有効である[91]:48, 55。油や空気を用いた流体潤滑を活用する軸受は流体潤滑軸受と呼ばれる。これらには静圧を利用するものと動圧を利用するものがある。低摩擦で清浄という利点から、静圧気体軸受が精密加工機や計測機器などで用いられる[91]:36, 43-45。
ナイロン、HDPEやPTFEのような熱可塑性樹脂の多くは摩擦が小さく、摩擦面の材料として用いられる[92]:233-234。これらの物質は、荷重とすべり速度が増えることで接触部が融点もしくは軟化点に達し、摩擦特性が一変するという性質がある[46]。過酷な条件や重要度の高い箇所で使用される軸受では、摩耗耐性を向上させるために分子量が極めて高いグレードの物質が要求される。
潤滑剤
摩擦面にオイル、水、グリースのような潤滑剤を塗ると摩擦係数は劇的に小さくなる。潤滑剤としては主に薄い液体層やグラファイトや滑石などの粉体が用いられるが、音響潤滑では物質ではなく音を利用する。機械部品の間の摩擦を低減するため、部品の一方に微小な振動を印加する方法がある。この方法はディザと呼ばれ、超音波カッターのように正弦波振動が与えられる場合もあれば、振動ノイズが与えられる場合もある。
関連項目
接触力学[要リンク修正]
- 摩擦帯電
- 単側接触
- 摩擦トルク
ルミネセンス(トライボルミネセンス)- クラッチ
- フリクションドライブ
- ジャダー
- 摩擦圧接
脚注
- ^ abcHanaor, D.; Gan, Y.; Einav, I. (2016). “Static friction at fractal interfaces”. Tribology International 93: 229-238. https://www.researchgate.net/profile/Dorian_Hanaor/publication/283675011_Static_friction_at_fractal_interfaces/links/5645bda508ae9f9c13e6f162.pdf.
^ 松川宏「(総合報告)摩擦の物理」、『日本表面科学会会誌「表面科学」』第6号、2003年。
- ^ abF. P. ボーデン、D. テイバー 『摩擦の話――トリボロジー入門』 原康夫訳、河出書房新社〈現代の科学〉、1974年。
- ^ abcdefg村木正芳 『図解 トライボロジー 摩擦の科学と潤滑技術』 日刊工業新聞社、2007年。.mw-parser-output cite.citation{font-style:inherit}.mw-parser-output .citation q{quotes:"""""""'""'"}.mw-parser-output .citation .cs1-lock-free a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-limited a,.mw-parser-output .citation .cs1-lock-registration a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-subscription a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration{color:#555}.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration span{border-bottom:1px dotted;cursor:help}.mw-parser-output .cs1-ws-icon a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/4/4c/Wikisource-logo.svg/12px-Wikisource-logo.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output code.cs1-code{color:inherit;background:inherit;border:inherit;padding:inherit}.mw-parser-output .cs1-hidden-error{display:none;font-size:100%}.mw-parser-output .cs1-visible-error{font-size:100%}.mw-parser-output .cs1-maint{display:none;color:#33aa33;margin-left:0.3em}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-format{font-size:95%}.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-left{padding-left:0.2em}.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-right{padding-right:0.2em}
ISBN 9784526057977。
^ Ruina, Andy; Pratap, Rudra (2002) (PDF). Introduction to Statics and Dynamics. Oxford University Press. p. 713. http://ruina.tam.cornell.edu/Book/RuinaPratapNoProblems.pdf.
^ Hibbeler, R. C. (2007). Engineering Mechanics (Eleventh ed.). Pearson, Prentice Hall. p. 393. ISBN 0-13-127146-6.
^ Soutas-Little, Robert W.; Inman, Balint (2008). Engineering Mechanics. Thomson. p. 329. ISBN 0-495-29610-4.
- ^ abc「摩擦」『物理学辞典』 物理学辞典編集委員会、培風館、2005年、三訂版、2256頁。
ISBN 456302094X。
- ^ abcdefghij松川宏 『摩擦の物理』 岩波書店〈岩波講座物理の世界〉、2012年。
ISBN 9784000111386。
- ^ abcdefg佐々木信也(他) 『はじめてのトライボロジー』 講談社、2013年。
ISBN 9784061565227。
- ^ abChatterjee, Sudipta (2008年). Tribological Properties of Pseudo-elastic Nickel-titanium (Thesis). University of California.. pp. 11-12. ISBN 9780549844372. https://books.google.com/books?id=rX6xfoEaYtQC&pg=PA12. "Classical Greek philosophers like Aristotle, Pliny the Elder and Vitruvius wrote about the existence of friction, the effect of lubricants and the advantages of metal bearings around 350 B.C."
^ Fishbane, Paul M.; Gasiorowicz, Stephen; Thornton, Stephen T. (1993). Physics for Scientists and Engineers. I (Extended ed.). Englewood Cliffs, New Jersey: Prentice Hall. p. 135. ISBN 0-13-663246-7. ""Themistius first stated around 350 B.C.〔ママ〕 that kinetic friction is weaker than the maximum value of static friction.""
^ Hecht, Eugene (2003). Physics: Algebra/Trig (3rd ed.). Cengage Learning. ISBN 9780534377298.
^ Sambursky, Samuel (2014). The Physical World of Late Antiquity. Princeton University Press. pp. 65-66. ISBN 9781400858989. https://books.google.com/books?id=Yvz_AwAAQBAJ&pg=PA65.
- ^ abcdeDowson, Duncan (1997). History of Tribology (2nd ed.). Professional Engineering Publishing. ISBN 1-86058-070-X.
- ^ abcArmstrong-Helouvry, Brian (1991). Control of machines with friction. USA: Springer. p. 10. ISBN 0-7923-9133-0. https://books.google.com/?id=0zk_zI3xACgC&pg=PA10.
- ^ abvan Beek, Anton. “History of Science Friction”. tribology-abc.com. 2011年3月24日閲覧。
^ Hutchings, Ian M. (2016-08-15). “Leonardo da Vinci's studies of friction” (PDF). Wear 360-361: 51-66. doi:10.1016/j.wear.2016.04.019. http://www.ifm.eng.cam.ac.uk/uploads/Hutchings_Leonardo_Friction_2016_v2.pdf.
^ Kirk, Tom (2016年7月22日). “Study reveals Leonardo da Vinci's 'irrelevant' scribbles mark the spot where he first recorded the laws of friction”. phys.org. 2016年7月26日閲覧。
^ Forest de Belidor, Bernard. "Richtige Grund-Satze der Friction-Berechnung" ("Correct Basics of Friction Calculation"), 1737, (in German)
^ “Leonhard Euler”. Friction Moduleublisher = Nano Worldear = 2002. 2011年3月25日閲覧。
^ Goedecke, Andreas (2014). Transient Effects in Friction: Fractal Asperity Creep. Springer Science and Business Media. pp. 3. ISBN 370911506X. https://books.google.com/books?id=kP7EBAAAQBAJ&pg=PA3&dq=Theophilus+Desaguliers.
^ dwell time。物体が面の上で静止してから次に動かされるまでの時間[9]。time of reposeとも
^ Fleeming Jenkin & James Alfred Ewing (1877) "On Friction between Surfaces moving at Low Speeds", Philosophical Magazine Series 5, volume 4, pp 308-10; link from Biodiversity Heritage Library
- ^ abcdefghijk田中久一郎 『摩擦のおはなし』 日本規格協会、1985年。
ISBN 4542901203。
- ^ abcd木村好次 (2009). “トライボロジーの“常識”を考える”. NACHI TECHNICAL REPORT (株式会社不二越) 18. https://www.nachi-fujikoshi.co.jp/tec/pdf/18a1.pdf 2017年10月26日閲覧。.
- ^ abcd角田和雄 『摩擦の世界』 岩波書店〈岩波新書〉、1994年。
ISBN 4004303621。
- ^ abcdefghi阿保政義 「第1章 第4節 摩擦現象とその基礎理論」『トライボロジー設計マニュアル』 似内昭夫(監修)、テクノシステム、2015年、27-33頁。
ISBN 9784924728738。
- ^ ab入江敏博・山田元、2003、『工業力学』第1版、 理工学社〈機械工学基礎講座〉
ISBN 4-8445-2137-3
^ 日本機械学会(編)、2007、『機械工学辞典』第2版、 丸善
ISBN 978-4-88898-083-8
^ Statics: Analysis and Design of Systems in Equilibrium. Wiley and Sons. (2005). p. 618. ISBN 0-471-37299-4. "In general, for given contacting surfaces, μk < μs"
^ Meriam, James L.; Kraige, L. Glenn; Palm, William John (2002). Engineering Mechanics: Statics. Wiley and Sons. p. 330. ISBN 0-471-40646-5. "Kinetic friction force is usually somewhat less than the maximum static friction force."
^ “The Feynman Lectures on Physics, Vol. I, p. 12-5”. Addison-Wesley (1964年). 2009年10月16日閲覧。
- ^ abPersson, B. N.; Volokitin, A. I (2002). “Theory of rubber friction: Nonstationary sliding”. Physical Review B 65 (13): 134106. Bibcode 2002PhRvB..65m4106P. doi:10.1103/PhysRevB.65.134106. https://journals.aps.org/prb/pdf/10.1103/PhysRevB.65.134106.
- ^ ab安藤信三 『電気鉄道概論』 成山堂書店、2003年、改訂増補版、118-121頁。
ISBN 4425925025。
^ Nichols, Edward Leamington; Franklin, William Suddards (1898). The Elements of Physics. 1. Macmillan. p. 101. https://books.google.com/?id=8IlCAAAAIAAJ.
^ Greenwood J.A. and JB Williamson (1966). “Contact of nominally flat surfaces”. Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences 295 (1442).
^ Haslinger, J.; Nedlec, J.C. (1983). “Approximation of the Signorini problem with friction, obeying the Coulomb law”. Mathematical Methods in the Applied Sciences 5: 422-437. Bibcode 1983MMAS....5..422H. doi:10.1002/mma.1670050127.
^ Alart, P.; Curnier, A. (1991). “A mixed formulation for frictional contact problems prone to Newton like solution method”. Computer Methods in Applied Mechanics and Engineering 92 (3): 353-375. Bibcode 1991CMAME..92..353A. doi:10.1016/0045-7825(91)90022-X.
^ Acary, V.; Cadoux, F.; Lemarechal, C.; Malick, J. (2011). “A formulation of the linear discrete Coulomb friction problem via convex optimization”. Journal of Applied Mathematics and Mechanics / Zeitschrift fur Angewandte Mathematik und Mechanik 91 (2): 155-175. Bibcode 2011ZaMM...91..155A. doi:10.1002/zamm.201000073.
^ De Saxce, G.; Feng, Z.-Q. (1998). “The bipotential method: A constructive approach to design the complete contact law with friction and improved numerical algorithms”. Mathematical and Computer Modelling 28 (4): 225-245. doi:10.1016/S0895-7177(98)00119-8.
^ Simo, J.C.; Laursen, T.A. (1992). “An augmented lagrangian treatment of contact problems involving friction”. Computers and Structures 42 (2): 97-116. doi:10.1016/0045-7949(92)90540-G.
^ Acary, V.; Brogliato, B. (2008). Numerical Methods for Nonsmooth Dynamical Systems. Applications in Mechanics and Electronics. 35. Springer Verlag Heidelberg.
^ Air Brake Association (1921). The Principles and Design of Foundation Brake Rigging. Air brake association. p. 5. https://books.google.com/books?id=DoNBAQAAMAAJ&pg=PA5.
- ^ abcdefghijklmnopqrstuvwxyzaa“Friction Factors - Coefficients of Friction”. 2015年4月27日閲覧。
- ^ abFrancis E. Kennedy (2000). “Frictional Heating and Contact Temperatures”. In Bharat Bhushan. Modern Tribology Handbook. CRC Press. https://books.google.com/books?id=h6X0NM7ME8IC&pg=PA236 2017年11月30日閲覧。.
^ 森誠之「トライボロジーと表面科学」、『表面科学』第32巻第5号、2011年、 270-278頁、 NAID 10028287611。
^ 森誠之「ダイナミックな界面現象の最前線」、『表面科学』第38巻第3号、2017年、 103頁、 NAID 130005475390。
- ^ abcdhttp://mechanicalemax.blogspot.com/2016/03/tribology-introduction.html
^ “Ultra-low friction coefficient in alumina-silicon nitride pair lubricated with water”. Wear 296: 656-659. doi:10.1016/j.wear.2012.07.030. http://www.sciencedirect.com/science/article/pii/S0043164812002736 2015年4月27日閲覧。.
^ Tian, Y.; Bastawros, A. F.; Lo, C. C. H.; Constant, A. P.; Russell, A.M.; Cook, B. A. (2003). “Superhard self-lubricating AlMgB[sub 14] films for microelectromechanical devices”. Applied Physics Letters 83 (14): 2781. Bibcode 2003ApPhL..83.2781T. doi:10.1063/1.1615677.
^ Kleiner, Kurt (2008年11月21日). “Material slicker than Teflon discovered by accident”. 2008年12月25日閲覧。
^ Higdon, C.; Cook, B.; Harringa, J.; Russell, A.; 金smith, J.; Qu, J.; Blau, P. (2011). “Friction and wear mechanisms in AlMgB14-TiB2 nanocoatings”. Wear 271 (9-10): 2111-2115. doi:10.1016/j.wear.2010.11.044.
- ^ abcdeCoefficient of Friction Archived March 8, 2009, at the Wayback Machine.. EngineersHandbook.com
- ^ ab“Coefficients of Friction of Human Joints”. 2015年4月27日閲覧。
- ^ abcdefghi“The Engineering Toolbox: Friction and Coefficients of Friction”. 2008年11月23日閲覧。
^ “プラスチック・樹脂の用語解説 さ行 自己潤滑性”. 2017年10月21日閲覧。
- ^ ab笠原又一「自己潤滑性トライボマテリアル」、『日本ロボット学会誌』第13巻第2号、1995年、 205-208頁、 doi:10.7210/jrsj.13.205。
- ^ abDeng, Zhao (October 14, 2012). “Adhesion-dependent negative friction coefficient on chemically modified graphite at the nanoscale”. Nature 11: 1032-7. Bibcode 2012NatMa..11.1032D. doi:10.1038/nmat3452. PMID 23064494. http://www.nature.com/nmat/journal/vaop/ncurrent/full/nmat3452.html 2012年11月18日閲覧. Lay summary – R&D Magazine (October 17, 2012).
^ Persson, B. N. J. (2000). Sliding friction: physical principles and applications. Springer. ISBN 978-3-540-67192-3. https://books.google.com/books?id=1jb-nZMnRGYC&q=kinetic+friction#v=snippet&q=kinetic%20friction&f=false 2016年1月23日閲覧。.
^ “ミーゼスの降伏条件 ― 法則の辞典の解説”. コトバンク. 2017年10月14日閲覧。
^ Makkonen, L (2012). “A thermodynamic model of sliding friction”. AIP Advances 2: 012179. Bibcode 2012AIPA....2a2179M. doi:10.1063/1.3699027.
^ Bigoni, D.. Nonlinear Solid Mechanics: Bifurcation Theory and Material Instability. Cambridge University Press, 2012. ISBN 9781107025417.
^ Adams, G. G. (1995). “Self-excited oscillations of two elastic half-spaces sliding with a constant coefficient of friction”. Journal of Applied Mechanics 62: 867-872. Bibcode 1995JAM....62..867A. doi:10.1115/1.2896013.
^ Martins, J.A., Faria, L.O. & Guimaraes, J. (1995). “Dynamic surface solutions in linear elasticity and viscoelasticity with frictional boundary conditions”. Journal of Vibration and Acoustics 117: 445-451. doi:10.1115/1.2874477.
^ M, Nosonovsky,; G., Adams G. (2004). “Vibration and stability of frictional sliding of two elastic bodies with a wavy contact interface”. Journal of Applied Mechanics 71: 154-161. Bibcode 2004JAM....71..154N. doi:10.1115/1.1653684.
^ R., Rice, J.; L., Ruina, A. (1983). “Stability of Steady Frictional Slipping”. Journal of Applied Mechanics 50 (2): 343-349. Bibcode 1983JAM....50..343R. doi:10.1115/1.3167042. http://ruina.tam.cornell.edu/research/topics/friction_and_fracture/stability_steady.pdf.
^ J., Flint,; J., Hulten, (2002). “Lining-deformation-induced modal coupling as squeal generator in a distributed parameter disk brake model”. J. Sound and Vibration 254: 1-21. Bibcode 2002JSV...254....1F. doi:10.1006/jsvi.2001.4052.
^ M., Kroger,; M., Neubauer,; K., Popp, (2008). “Experimental investigation on the avoidance of self-excited vibrations”. Phil. Trans. R. Soc. A 366 (1866): 785-810. Bibcode 2008RSPTA.366..785K. doi:10.1098/rsta.2007.2127. PMID 17947204.
^ Bigoni, D.; Noselli, G. (2011). “Experimental evidence of flutter and divergence instabilities induced by dry friction”. Journal of the Mechanics and Physics of Solids 59 (10): 2208-2226. Bibcode 2011JMPSo..59.2208B. doi:10.1016/j.jmps.2011.05.007. http://www.ing.unitn.it/~bigoni.
^ 動画による解説
^ Nosonovsky, Michael (2013). Friction-Induced Vibrations and Self-Organization: Mechanics and Non-Equilibrium Thermodynamics of Sliding Contact. CRC Press. p. 333. ISBN 978-1466504011. http://www.crcpress.com/product/isbn/9781466504011.
- ^ ab風間俊治 「第1章 第10節 潤滑理論 第1項 流体潤滑」『トライボロジー設計マニュアル』 似内昭夫(監修)、テクノシステム、2015年、89頁。
ISBN 9784924728738。
^ Silliman, Benjamin (1871) Principles of Physics, Or Natural Philosophy, Ivison, Blakeman, Taylor & company publishers
^ Butt, Hans-Jurgen; Graf, Karlheinz and Kappl, Michael (2006) Physics and Chemistry of Interfaces, Wiley,
3-527-40413-9
^ Hogan, C. Michael (1973). “Analysis of highway noise”. Water, Air, & Soil Pollution 2 (3): 387-392. doi:10.1007/BF00159677.
^ Ternes, Markus; Lutz, Christopher P.; Hirjibehedin, Cyrus F.; Giessibl, Franz J.; Heinrich, Andreas J. (2008-02-22). “The Force Needed to Move an Atom on a Surface”. Science 319 (5866): 1066-1069. Bibcode 2008Sci...319.1066T. doi:10.1126/science.1150288. PMID 18292336.
^ Dienwiebel, Martin (2004). “Superlubricity of Graphite”. Phys. Rev. Lett. 92 (12): 126101. Bibcode 2004PhRvL..92l6101D. doi:10.1103/PhysRevLett.92.126101. http://www.physics.leidenuniv.nl/sections/cm/ip/group/PDF/Phys.rev.lett/2004/92(2004)12601.pdf.
^ 「内部摩擦」『物理学辞典』 物理学辞典編集委員会、培風館、2005年、三訂版、1644頁。
ISBN 456302094X。
^ Einstein, A. (1909). On the development of our views concerning the nature and constitution of radiation. Translated in: The Collected Papers of Albert Einstein, vol. 2 (Princeton University Press, Princeton, 1989). Princeton, NJ: Princeton University Press. p. 391.
^ Den Hartog, J. P. (1961). Mechanics. Courier Dover Publications. p. 142. ISBN 0-486-60754-2. https://books.google.com/?id=WRXrtu44W9UC.
^ Leonard, William J (2000). Minds-on Physics. Kendall/Hunt. p. 603. ISBN 0-7872-3932-1. https://books.google.com/?id=t_AKvmza5s8C&pg=PA603.
^ 広中清一郎 『よくわかる最新摩擦と摩耗の基本と仕組み』 秀和システム、2010年、82頁。
ISBN 9784798026190。
^ Bayer, Raymond George (2004). Mechanical wear. CRC Press. pp. 1, 2. ISBN 0-8247-4620-1. https://books.google.com/?id=Q64Kq2HlyucC&pg=PA3&lpg=PA3&dq=Physical+wear+is+associated+with+friction 2008年7月7日閲覧。.
- ^ abc山崎俊一「自動車用タイヤのトライボロジー」、『日本ゴム協会誌』第4号、 229-235頁、 NAID 10002118257。
^ 『自動車用タイヤの基礎と実際』 株式会社ブリヂストン、山海堂、2006年。
- ^ ab「トラクション、トラクション係数、トラクションコントロールシステム」『大車林―自動車情報事典』 三栄書房、2003年、292-293頁。
^ 「摩擦係数(タイヤ)」『大車林―自動車情報事典』 三栄書房、2003年、394頁。
^ ここでいうトラクション係数を慣用的に「摩擦係数」もしくは「μ(ミュー)」と呼ぶことがあるが[88]、物理的な静止摩擦係数・動摩擦係数とは異なる[85]。
^ Iskander, R and Stevens, A. “Effectiveness of the Application of High Friction Surfacing-Crash-Reduction.pdf”. 2017年9月3日閲覧。
- ^ ab日本機械学会(編)、2005、『機械工学便覧 デザイン編 β4 機械要素・トライボロジー』初版、 丸善
ISBN 4-88898-129-9
^ 山本雄二・兼田楨宏、1998、『トライボロジー』第1版、 理工学社
ISBN 4-8445-2146-2
外部リンク
日本トライボロジー学会(2017年10月12日閲覧)
トライボロジー総合技術情報誌「月刊トライボロジー」(2017年10月12日閲覧)- 『摩擦』 - コトバンク


